linewidth = 1;
markersize = 5;
fixed = [ 1 1 -1 -1 1 -1 -0.2 0.1;
1 -1 -1 1 -0.5 -0.2 -1 1]';
M = size(fixed,1);
N = 6;
A = [ 1 0 0 -1 0 0 0 0 0 0 0 0 0 0
1 0 -1 0 0 0 0 0 0 0 0 0 0 0
1 0 0 0 -1 0 0 0 0 0 0 0 0 0
1 0 0 0 0 0 -1 0 0 0 0 0 0 0
1 0 0 0 0 0 0 -1 0 0 0 0 0 0
1 0 0 0 0 0 0 0 0 0 -1 0 0 0
1 0 0 0 0 0 0 0 0 0 0 0 0 -1
0 1 -1 0 0 0 0 0 0 0 0 0 0 0
0 1 0 -1 0 0 0 0 0 0 0 0 0 0
0 1 0 0 0 -1 0 0 0 0 0 0 0 0
0 1 0 0 0 0 0 -1 0 0 0 0 0 0
0 1 0 0 0 0 0 0 -1 0 0 0 0 0
0 1 0 0 0 0 0 0 0 0 0 0 -1 0
0 0 1 -1 0 0 0 0 0 0 0 0 0 0
0 0 1 0 0 0 0 -1 0 0 0 0 0 0
0 0 1 0 0 0 0 0 0 0 -1 0 0 0
0 0 0 1 -1 0 0 0 0 0 0 0 0 0
0 0 0 1 0 0 0 0 -1 0 0 0 0 0
0 0 0 1 0 0 0 0 0 -1 0 0 0 0
0 0 0 1 0 0 0 0 0 0 0 -1 0 0
0 0 0 1 0 -1 0 0 0 0 0 -1 0 0
0 0 0 0 1 -1 0 0 0 0 0 0 0 0
0 0 0 0 1 0 -1 0 0 0 0 0 0 0
0 0 0 0 1 0 0 0 0 -1 0 0 0 0
0 0 0 0 1 0 0 0 0 0 0 0 0 -1
0 0 0 0 0 1 0 0 -1 0 0 0 0 0
0 0 0 0 0 1 0 0 0 0 -1 0 0 0 ];
nolinks = size(A,1);
fprintf(1,'Computing the optimal locations of the 6 free points...');
cvx_begin
variable x(N+M,2)
minimize ( sum(square_pos(norms( A*x,2,2 ))))
x(N+[1:M],:) == fixed;
cvx_end
fprintf(1,'Done! \n');
free_sum = x(1:N,:);
figure(1);
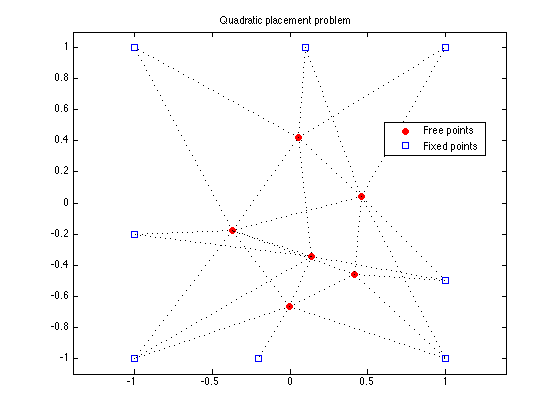
dots = plot(free_sum(:,1), free_sum(:,2), 'or', fixed(:,1), fixed(:,2), 'bs');
set(dots(1),'MarkerFaceColor','red');
hold on
legend('Free points','Fixed points','Location','Best');
for i=1:nolinks
ind = find(A(i,:));
line2 = plot(x(ind,1), x(ind,2), ':k');
hold on
set(line2,'LineWidth',linewidth);
end
axis([-1.1 1.1 -1.1 1.1]) ;
axis equal;
title('Quadratic placement problem');
figure(2)
all = [free_sum; fixed];
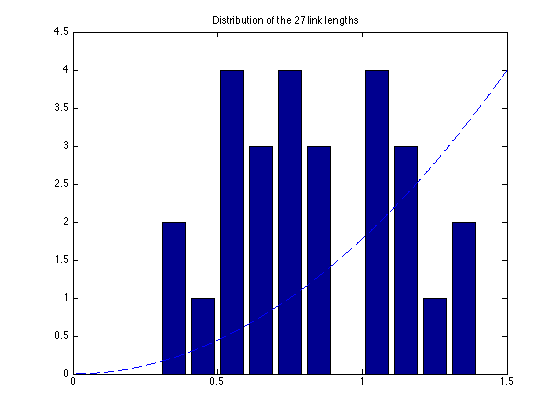
bins = 0.05:0.1:1.95;
lengths = sqrt(sum((A*all).^2')');
[N2,hist2] = hist(lengths,bins);
bar(hist2,N2);
hold on;
xx = linspace(0,2,1000); yy = (4/1.5^2)*xx.^2;
plot(xx,yy,'--');
axis([0 1.5 0 4.5]);
hold on
plot([0 2], [0 0 ], 'k-');
title('Distribution of the 27 link lengths');
Computing the optimal locations of the 6 free points...
Calling SDPT3: 216 variables, 120 equality constraints
For improved efficiency, SDPT3 is solving the dual problem.
------------------------------------------------------------
num. of constraints = 120
dim. of sdp var = 54, num. of sdp blk = 27
dim. of socp var = 81, num. of socp blk = 27
dim. of linear var = 54
*******************************************************************
SDPT3: Infeasible path-following algorithms
*******************************************************************
version predcorr gam expon scale_data
HKM 1 0.000 1 0
it pstep dstep pinfeas dinfeas gap prim-obj dual-obj cputime
-------------------------------------------------------------------
0|0.000|0.000|1.6e+01|1.2e+01|1.4e+04| 2.700000e+02 0.000000e+00| 0:0:00| chol 1 1
1|0.813|0.818|2.9e+00|2.2e+00|3.4e+03| 2.733869e+02 -2.561504e+02| 0:0:00| chol 1 1
2|1.000|1.000|2.7e-06|1.0e-02|5.2e+02| 2.225971e+02 -2.937806e+02| 0:0:00| chol 1 1
3|1.000|1.000|1.8e-06|1.0e-03|1.5e+02| 4.292175e+01 -1.101842e+02| 0:0:00| chol 1 1
4|0.924|0.920|4.1e-07|1.7e-04|2.3e+01|-1.362729e+01 -3.664151e+01| 0:0:00| chol 1 1
5|1.000|1.000|1.0e-08|1.0e-05|7.8e+00|-1.787508e+01 -2.562965e+01| 0:0:00| chol 1 1
6|0.933|0.934|4.1e-09|1.6e-06|6.6e-01|-2.034619e+01 -2.100934e+01| 0:0:00| chol 1 1
7|0.996|0.995|1.5e-09|1.1e-07|2.1e-02|-2.054125e+01 -2.056189e+01| 0:0:00| chol 1 1
8|0.989|0.989|4.5e-10|1.1e-08|2.3e-04|-2.054724e+01 -2.054748e+01| 0:0:00| chol 1 1
9|0.989|0.989|9.0e-12|2.2e-10|2.6e-06|-2.054731e+01 -2.054732e+01| 0:0:00| chol 1 1
10|0.997|0.996|4.7e-13|2.6e-12|3.4e-08|-2.054731e+01 -2.054731e+01| 0:0:00|
stop: max(relative gap, infeasibilities) < 1.49e-08
-------------------------------------------------------------------
number of iterations = 10
primal objective value = -2.05473136e+01
dual objective value = -2.05473136e+01
gap := trace(XZ) = 3.37e-08
relative gap = 8.02e-10
actual relative gap = 7.92e-10
rel. primal infeas = 4.74e-13
rel. dual infeas = 2.63e-12
norm(X), norm(y), norm(Z) = 2.0e+01, 6.7e+00, 1.1e+01
norm(A), norm(b), norm(C) = 1.8e+01, 6.2e+00, 9.3e+00
Total CPU time (secs) = 0.26
CPU time per iteration = 0.03
termination code = 0
DIMACS: 1.5e-12 0.0e+00 8.2e-12 0.0e+00 7.9e-10 8.0e-10
-------------------------------------------------------------------
------------------------------------------------------------
Status: Solved
Optimal value (cvx_optval): +20.5473
Done!