n = 2;
A = eye(n);
b = zeros(n,1);
C = [2 1; -.5 1];
d = [-3; -3];
cvx_begin
variables x(n) y(n) w(n)
dual variables lam muu z
minimize ( norm(w,2) )
subject to
lam: square_pos( norm (A*x + b) ) <= 1;
muu: square_pos( norm (C*y + d) ) <= 1;
z: x - y == w;
cvx_end
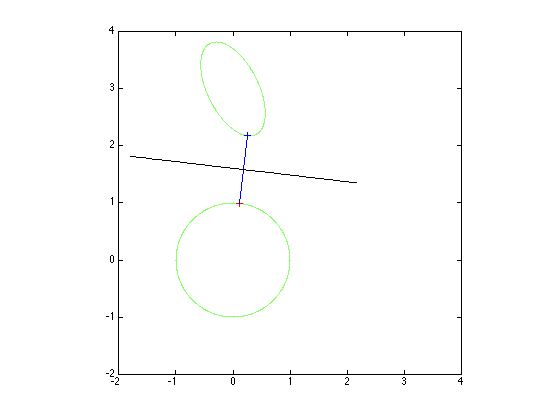
t = (x + y)/2;
p=z;
p(1) = z(2); p(2) = -z(1);
c = linspace(-2,2,100);
q = repmat(t,1,length(c)) +p*c;
nopts = 1000;
angles = linspace(0,2*pi,nopts);
[u,v] = meshgrid([-2:0.01:4]);
z1 = (A(1,1)*u + A(1,2)*v + b(1)).^2 + (A(2,1)*u + A(2,2)*v + b(2)).^2;
z2 = (C(1,1)*u + C(1,2)*v + d(1)).^2 + (C(2,1)*u + C(2,2)*v + d(2)).^2;
contour(u,v,z1,[1 1]);
hold on;
contour(u,v,z2,[1 1]);
axis square
plot(x(1),x(2),'r+');
plot(y(1),y(2),'b+');
line([x(1) y(1)],[x(2) y(2)]);
plot(q(1,:),q(2,:),'k');
Calling SDPT3: 23 variables, 10 equality constraints
------------------------------------------------------------
num. of constraints = 10
dim. of sdp var = 4, num. of sdp blk = 2
dim. of socp var = 9, num. of socp blk = 3
dim. of linear var = 6
dim. of free var = 2 *** convert ublk to lblk
*******************************************************************
SDPT3: Infeasible path-following algorithms
*******************************************************************
version predcorr gam expon scale_data
HKM 1 0.000 1 0
it pstep dstep pinfeas dinfeas gap prim-obj dual-obj cputime
-------------------------------------------------------------------
0|0.000|0.000|6.7e+00|1.7e+01|1.4e+03| 3.464102e+00 0.000000e+00| 0:0:00| chol 1 1
1|0.836|0.635|1.1e+00|6.2e+00|2.7e+02| 6.825272e+00 -2.359565e+01| 0:0:00| chol 1 1
2|1.000|0.954|5.7e-07|3.0e-01|3.1e+01| 4.435320e+00 -2.473466e+01| 0:0:00| chol 1 1
3|0.977|0.862|3.0e-06|4.2e-02|4.2e+00| 2.926933e+00 -1.120011e+00| 0:0:00| chol 1 1
4|0.768|0.466|6.2e-07|2.2e-02|2.4e+00| 1.754830e+00 -5.541660e-01| 0:0:00| chol 1 1
5|1.000|0.587|5.4e-08|9.2e-03|9.1e-01| 1.347425e+00 4.799600e-01| 0:0:00| chol 1 1
6|0.997|0.949|2.1e-08|4.7e-04|4.3e-02| 1.204087e+00 1.163167e+00| 0:0:00| chol 1 1
7|0.975|0.984|9.7e-10|7.5e-06|7.8e-04| 1.192715e+00 1.191959e+00| 0:0:00| chol 1 1
8|0.959|0.979|9.6e-11|1.7e-05|5.6e-05| 1.192453e+00 1.192431e+00| 0:0:00| chol 1 1
9|0.973|0.969|4.1e-12|1.2e-06|3.3e-06| 1.192442e+00 1.192441e+00| 0:0:00| chol 1 1
10|1.000|0.974|1.8e-13|7.2e-08|2.4e-07| 1.192441e+00 1.192441e+00| 0:0:00| chol 1 1
11|1.000|0.987|1.8e-11|5.1e-09|1.4e-08| 1.192441e+00 1.192441e+00| 0:0:00|
stop: max(relative gap, infeasibilities) < 1.49e-08
-------------------------------------------------------------------
number of iterations = 11
primal objective value = 1.19244136e+00
dual objective value = 1.19244136e+00
gap := trace(XZ) = 1.37e-08
relative gap = 4.04e-09
actual relative gap = 9.86e-10
rel. primal infeas = 1.77e-11
rel. dual infeas = 5.14e-09
norm(X), norm(y), norm(Z) = 4.1e+00, 2.2e+00, 3.2e+00
norm(A), norm(b), norm(C) = 7.0e+00, 5.7e+00, 2.0e+00
Total CPU time (secs) = 0.31
CPU time per iteration = 0.03
termination code = 0
DIMACS: 2.5e-11 0.0e+00 5.1e-09 0.0e+00 9.9e-10 4.0e-09
-------------------------------------------------------------------
------------------------------------------------------------
Status: Solved
Optimal value (cvx_optval): +1.19244