
Acknowledgement: This lab assignment is based on Project 4: Ghostbusters, which is a part of a recent offering of CS188 at UC Berkeley. The code and resources provided here are almost entirely drawn from the Berkeley project. We thank the authors at Berkeley for making their project available to the public.
We continue where we left off last week: implementing inference to identify the (approximate) location of ghosts in the game of Ghostbusters. In this assignment, we will focus on implementing algorithms for performing inference using Particle Filters and Dynamic Bayes Nets.
The base code for this assignment is available in this zip file. Here is the list of files present in the tracking directory.
| Files you will edit | |
| inference.py | Code for tracking ghosts over time using their sounds |
| Files you must not edit | |
| busters.py | The main entry to Ghostbusters (replacing Pacman.py) |
| bustersAgents.py | Agents for playing the Ghostbusters variant of Pacman |
| bustersGhostAgents.py | New ghost agents for Ghostbusters |
| distanceCalculator.py | Computes maze distances |
| game.py | Inner workings and helper classes for Pacman |
| ghostAgents.py | Agents to control ghosts |
| graphicsDisplay.py | Graphics for Pacman |
| graphicsUtils.py | Support for Pacman graphics |
| keyboardAgents.py | Keyboard interfaces to control Pacman |
| layout.py | Code for reading layout files and storing their contents |
| util.py | Utility functions |
As described in Lab Assignment 5, in this version of Ghostbusters, the goal is to hunt down scared but invisible ghosts. The Pacman is equipped with sonar (ears) that provides noisy readings of the Manhattan distance to each ghost. The game ends when Pacman has eaten all the ghosts. Your primary task in this assignment is to implement inference (identifying the possible squares where ghosts could be located) to track the ghosts.
*.test files found in the subdirectories of the test_cases folder. For tests of class DoubleInferenceAgentTest, your will see visualisations of the inference distributions generated by your code, but all Pacman actions will be preselected according to the actions of our implementation. This is necessary in order to allow comparison of your distributions with our distributions. The second type of test is GameScoreTest, in which your BustersAgent will actually select actions for Pacman and you will watch your Pacman play and win games.
As you implement and debug your code, you may find it useful to run a single test at a time. In order to do this you will need to use the -t flag with the autograder. For example if you only want to run the first test of Task 1, use the following command.
python autograder.py -t test_cases/q1/1-ParticleObserve
In general, all test cases can be found inside test_cases/q*.
You will be evaluated on four tasks as a part of this
assignment. In each case your code will have to clear the tests
presented by the autograder. Additionally, create a text file
called descriptions.txt and fill it with an informative
description of the approach you used to solve each task. We need to be
assured that you have understood the underlying concept, and are not
merely going through the motions of "applying a formula". If your
descriptions are not clear, you may lose marks for the corresponding
tasks.
In this task, you will implement a particle filtering algorithm for tracking a single ghost.
Implement the functions initializeUniformly, getBeliefDistribution, and observe for the ParticleFilter class in inference.py. A correct implementation should also handle two special cases.
observe. When complete, you should be able to track ghosts nearly as effectively as with exact inference.Run the autograder for this question as follows and visualise the output.
python autograder.py -q q1
util.sample or util.nSample will help you obtain samples from a distribution. If you use util.sample and your implementation is timing out, try using util.nSample, which needs to be called in a slightly different way from util.sample (see util.py for its definition).Implement the elapseTime function for the ParticleFilter class in inference.py. When complete, you should be able to track ghosts nearly as effectively as with exact inference.
Note that in this question, we will test both the elapseTime function in isolation, as well as the full implementation of the particle filter combining elapseTime and observe.
Run the autograder for this question and visualise the output.
python autograder.py -q q2
For the tests in this question we will sometimes use a ghost with random movements and other times we will use the GoSouthGhost. This ghost tends to move south so over time, and without any observations, Pacman's belief distribution should begin to focus around the bottom of the board. The test cases involve single and two independent ghosts. As mentioned earlier, we also test Pacman's ability to use both the information about ghost transition model (implemented in this task) and observations (implemented in the previous task) with approximate inference to catch 'em all! To see which ghost is used for each test case you can look in the .test files. As an example, you can run
python autograder.py -t test_cases/q2/2-ParticleElapse
and observe that the distribution becomes concentrated at the bottom of the board.
So far, we have tracked each ghost independently, which works fine for the default RandomGhost or more advanced DirectionalGhost. However, the prized DispersingGhost chooses actions that avoid other ghosts. Since the ghosts' transition models are no longer independent, all ghosts must be tracked jointly in a Dynamic Bayes Net!
The Bayes net has the following structure, where the hidden variables G represent ghost positions and the emission variables E are the noisy distances to each ghost. This structure can be extended to more ghosts, but only two (a and b) are shown below.
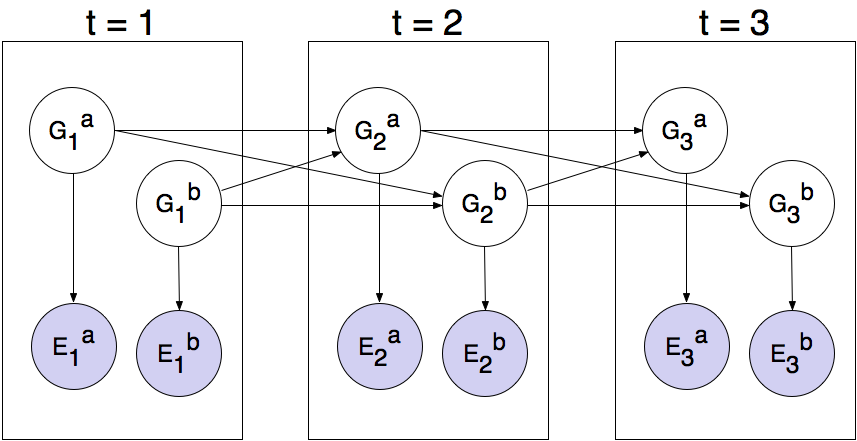
You will now implement a particle filter that tracks multiple ghosts simultaneously. Each particle will represent a tuple of ghost positions that is a sample of where all the ghosts are at the present time. The code is already set up to extract marginal distributions about each ghost from the joint inference algorithm you will create, so that belief clouds about individual ghosts can be displayed.
Complete the initializeParticles, getBeliefDistribution, and observeState methods in JointParticleFilter to weight and resample the whole list of particles based on new evidence. As before, a correct implementation should also handle two special cases.
observeState.You should now effectively track dispersing ghosts. To run the autograder for this question and visualize the output, use this command.
python autograder.py -q q3
The testcases involve two coordinating ghosts to be captured by Pacman. Like in the previous lab, in some cases where Pacman is boxed and unable to move, one can observe that Pacman is unable to locate the two ghosts exactly.
Complete the elapseTime method in JointParticleFilter in inference.py to resample each particle correctly for the Bayes Net. In particular, each ghost should draw a new position conditioned on the positions of all the ghosts at the previous time step. The comments in the method provide instructions for support functions to help with sampling and creating the correct distribution.
Note that these questions involve joint distributions and they require more computational power (and time) to grade, so please be patient!
As you run the autograder note that q4/1-JointParticleElapse and q4/2-JointParticleElapse test your elapseTime implementations only, and q4/3-JointParticleElapse tests both your elapseTime and observe implementations. Notice the difference between test 1 and test 3. In both tests, Pacman knows that the ghosts will move to the sides of the game board. What is different between the tests, and why?
To run the autograder for this question use this command.
python autograder.py -q q4
You're not done yet! Place all files which you've written code in or modified in a directory named 'la6-' appended by your roll number (say la6-12345678). Tar and Gzip the directory to produce a single compressed file (la6-12345678.tar.gz). It must contain the following files:
inference.py descriptions.txt citations.txt (if applicable)Submit this compressed file on Moodle, under Lab Assignment 6.