|
In this assignment, you will write code to compute an optimal policy for a given MDP using the algorithms that were discussed in class: Value Iteration, Howard's Policy Iteration, and Linear Programming. The first part of the assignment is to implement these algorithms. Input to these algorithms will be an MDP and the expected output is the optimal value function, along with an optimal policy.
MDP solvers have a variety of applications. As the second part of this assignment, you will use your solver to find the shortest path between a given start state and an end state in a maze.
The data directory in this compressed directory contains 2
folders: mdp and maze.
In the mdp folder, you are given six MDP instances (3 each for continuing and episodic tasks). A correct solution for each MDP is also given in the same folder, which you can use to test your code. In the maze folder, you are given 10 maze instances that you can use to test your code for the maze problem. Your code will also be evaluated on instances other than the ones provided.
Each MDP is provided as a text file in the following format.
numStates SThe number of states S and the number of actions A will be
integers greater than 1, and at most 100. Assume that the states are numbered 0, 1,
..., S - 1, and the actions are numbered 0, 1, ..., A -
1. Each line that begins with "transition" gives the reward and
transition probability corresponding to a transition, where R(s1, ac, s2) = r and
T(s1, ac, s2) = p. Rewards can be positive, negative, or
zero. Transitions with zero probabilities are not specified. mdptype will be one of continuing and episodic. The
discount factor gamma is a real number between 0 (included)
and 1 (included). Recall that gamma is a part of the MDP: you must not change it inside your solver! Also recall that it is okay to use gamma = 1 in episodic tasks that guarantee termination; you will find such an example among the ones given.
st is the start state, which you might need for Task 2 (ignore for Task 1). ed1, ed2,..., edn are the end states (terminal states). For continuing tasks with no terminal states, this list is replaced by -1.
To get familiar with the MDP file format, you can view and
run generateMDP.py (provided in
the base directory), which is a python script used to
generate random MDPs. Specify the number of states and actions, the
discount factor, type of mdp (episodic or continuing), and the random seed as command-line arguments to this file. Two examples of how this script can be invoked are given below.
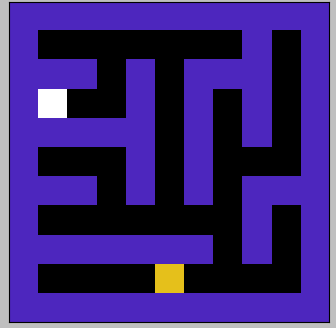
python generateMDP.py --S 2 --A 2 --gamma 0.90 --mdptype episodic --rseed 0python generateMDP.py --S 50 --A 20 --gamma 0.20 --mdptype continuing --rseed 0Each maze is provided in a text file as a rectangular grid of 0's, 1's, 2, and 3's. An example is given here along with the visualisation.
1 1 1 1 1 1 1 1 1 1 1
1 0 0 0 0 0 0 0 1 0 1
1 1 1 0 1 0 1 1 1 0 1
1 3 0 0 1 0 1 0 1 0 1
1 1 1 1 1 0 1 0 1 0 1
1 0 0 0 1 0 1 0 0 0 1
1 1 1 0 1 0 1 0 1 1 1
1 0 0 0 0 0 0 0 1 0 1
1 1 1 1 1 1 1 0 1 0 1
1 0 0 0 0 2 0 0 0 0 1
1 1 1 1 1 1 1 1 1 1 1
Here 0 denotes an empty tile, 1 denotes an obstruction/wall, 2 denotes the start state and 3 denotes an end state. In the visualisation below, the white square is the end position and the yellow one is the start position.
|
|
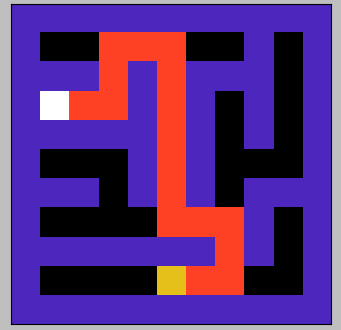
The figure on the right shows the shortest path.
Given an MDP, your program must compute the optimal value
function V* and an optimal policy π* by applying the algorithm that
is specified through the command line. Create a python file
called planner.py which accepts the following command-line arguments.
--mdp followed by a path to the input MDP file, and--algorithm followed by one of vi, hpi, and lp.Make no assumptions about the location of the MDP file relative to the current working directory; read it in from the path that will be provided. The algorithms specified above correspond to Value Iteration, Howard's Policy Iteration, and Linear Programming, respectively. Here are a few examples of how your planner might be invoked (it will always be invoked from its own directory).
python planner.py --mdp /home/user/data/mdp-4.txt --algorithm vipython planner.py --mdp /home/user/temp/data/mdp-7.txt --algorithm hpipython planner.py --mdp /home/user/mdpfiles/mdp-5.txt --algorithm lpYou are not expected to code up a solver for LP; rather, you can use available solvers as black-boxes (more below). Your effort will be in providing the LP solver the appropriate input based on the MDP, and interpreting its output appropriately. You are expected to write your own code for Value Iteration and Howard's Policy Iteration; you may not use any custom-built libraries that might be available for the purpose. You can use libraries for solving linear equations in the policy evaluation step but must write your own code for policy improvement. Recall that Howard's Policy Iteration switches all improvable states to some improving action; if there are two or more improving actions at a state, you are free to pick anyone.
The output of your planner must be in the following format and written to standard output.
V*(0) π*(0)
V*(1) π*(1)
.
.
.
V*(S - 1) π*(S - 1)
In the data/mdp directory provided, you will find
output files corresponding to the MDP files, which have solutions in
the format above.
Since your output will be checked automatically, make sure you have nothing printed to stdout other than the S lines as above in sequence. If the testing code is unable to parse your output, you will not receive any marks.
Note:
- Your output has to be written to the standard output, not to any file.
- For values, print at least 6 places after the decimal point. Print more if you'd like, but 6 (
xxx.123456) will suffice.- If your code produces output that resembles the solution files: that is, S lines of the form
or evenvalue + "\t" + action + "\n"value + " " + action + "\n"you should be okay. Make sure you don't print anything else.
- If there are multiple optimal policies, feel free to print any one of them.
In this task, your objective is to find the shortest path from start to end in a specified maze. The idea is to piggyback on the planner code you have already written in Task 1.
Note: In this task, assume that any invalid move doesn't change the state e.g., a right move doesn't change the state if there's a wall on the immediate right of the current cell.
Your first step is to encode the maze as an MDP (use
the same format as described above). Then you will
use planner.py to find an optimal
policy. Finally, you will simulate the optimal policy on the maze in a
deterministic setting to extract a path from start to the end. Note that this path also corresponds to the shortest possible path
from start to end. Output the path as: A0 A1 A2 . . . .
Here
"A0 A1 A2 . . ." is the sequence of moves taken from the start state to
reach the end state along the simulated path. Each move must be one
of N (north), S (south), E (east), and W (west). See, for example, solution10.txt in the maze directory, for an illustrative solution.
To visualise the maze, use this command. python visualize.py gridfile
To visualise your solution, use this command. python visualize.py gridfile pathfile
Create a python file called encoder.py that will encode the maze as an MDP and output the MDP. The code should run as:
python encoder.py --grid gridfile > mdpfile
We will then run python planner.py --mdp mdpfile --algorithm vi > value_and_policy_file.
Also, create a python source file called decoder.py that will simulate the optimal policy and output the path taken between the start and end state given the file value_and_policy_file and the gridfile. The output format should be as specified
above. The script should run as follows.
python decoder.py --grid gridfile --value_policy value_and_policy_file
There are two python scripts given to verify the correctness of your submission format and solution: PlannerVerifyOutput.py and MazeVerifyOutput.py. Both of these scripts accept --algorithm as a command-line argument. The following are a few examples that can help you understand how to invoke these scripts.
python PlannerVerifyOutput.py --> Tests all three algorithms on the all the MDP instances given to you in the data/mdp directory.python PlannerVerifyOutput.py --mdp --algorithm vi --> Tests only value iteration algorithm on the all the MDP instances given to you in the data/mdp directory.python MazeVerifyOutput.py --mdp --algorithm vi --> Tests all the maze instances that are given in data/maze directory. Here, --algorithm specifies the algorithm that you would like to run on the MDP generated by encoder.py (we will check using value iteration).These scripts assume the location of the data directory to be in the same directory. Run these scripts to check the correctness of your submission format. Your code should pass all the checks written in the script. You will be penalised if your code does not pass all the checks.
Your code for any of the algorithms should not take more than one minute to run on any test instance.
Prepare a short report.pdf in which you put your design decisions, assumptions, and observations about the algorithms (if any). Also mention how you formulated the MDP for the maze problem.
Place all the files in which you have written code in a
directory named submission. Tar and Gzip the directory to
produce a single compressed file
(submission.tar.gz). It must contain the
following files.
planner.py encoder.py decoder.py report.pdf references.txt Submit this compressed file on Moodle, under Programming Assignment 2.
7 marks are reserved for Task 1 (2 marks each for the correctness of your Value Iteration and Howard's Policy Iteration algorithms, and 3 marks for Linear Programming).
3 marks are allotted for the correctness of Task 2.
We shall verify the correctness by computing and comparing optimal policies for a large number of unseen MDPs. If your code fails any test instances, you will be penalised based on the nature of the mistake made.
The TAs and instructor may look at your source code to corroborate the results obtained by your program, and may also call you to a face-to-face session to explain your code.
Your submission is due by 11.55 p.m., Friday, October 23. Finish working on your submission well in advance, keeping enough time to generate your data, compile the results, and upload to Moodle.
Your submission will not be evaluated (and will be given a score of zero) if it is not uploaded to Moodle by the deadline. Do not send your code to the instructor or TAs through any other channel. Requests to evaluate late submissions will not be entertained.
Your submission will receive a score of zero if your code does not execute on cs747 docker container. To make sure you have uploaded the right version, download it and check after submitting (but before the deadline, so you can handle any contingencies before the deadline lapses).
You are expected to comply with the rules laid out in the "Academic Honesty" section on the course web page, failing which you are liable to be reported for academic malpractice.
For the Linear Programming part of the assignment, we recommend you
to use the Python library PuLP. PuLP is
convenient to use directly from Python code: here is
a short
tutorial and here is
a reference.