|
GPU-based Global Illumination for Point Models using Fast Multipole Method
Abstract | Motivation and Problem Definition | Work Done | Publications| Technical Reports | Results | Conclusion | Presentation
- ABSTRACT
Advances in scanning technologies and rapidly growing complexity
of geometric objects motivated the use of point-based geometry
as an alternative surface representation, both for efficient
rendering and for flexible geometry processing of highly complex
3D-models. Based on their fundamental simplicity,
points have motivated a variety of research on topics such as shape
modeling, object capturing, simplification, rendering and hybrid
point-polygon methods.
Global Illumination for point models is an upcoming and an
interesting problem to solve. We use the Fast Multipole Method (FMM), a robust technique
for the evaluation of the combined effect of pairwise interactions of $n$
data sources, as the light transport kernel for inter-reflections, in
point models, to compute a description -- illumination maps -- of the
diffuse illumination. FMM, by itself, exhibits high amount of parallelism to be
exploited for achieving multi-fold speed-ups.
Graphics Processing Units (GPUs), traditionally designed for performing
graphics specific computations, now have fostered considerable interest in doing
computations that go beyond computer graphics; general purpose computation on GPUs,
or "GPGPU". GPUs may be viewed as data parallel compute co-processors that can provide
significant improvements in computational performance especially for algorithms which
exhibit sufficiently high amount of parallelism. One such algorithm is the Fast Multipole Method (FMM).
This report describes in detail the strategies for parallelization of all phases of the FMM and discusses
several techniques to optimize its computational performance on GPUs.
The heart of FMM lies in its clever use of its underlying data structure, the Octree. We present
two novel algorithms for constructing octrees in parallel on GPUs and discuss their performance based
on memory efficiency and running time. These algorithms can eventually be combined with the GPU-based
parallel FMM framework.
Correct global illumination results for point models require knowledge
of mutual point-pair visibility. Visibility Maps (V-maps) have been designed for
the same. Parallel implementation of V-map on GPU offer considerable performance
improvements and has been detailed in this report.
A complete global illumination solution for point models should cover both diffuse
and specular (reflections, refractions, and caustics) effects. Diffuse global illumination
is handled by generating illumination maps. For specular effects, we use the Splat-based Ray Tracing
technique for handling reflections and refractions in the scene and generate Caustic Maps
using optimized Photon generation and tracing algorithms. We further discuss a time-efficient
kNN query solver required for fast retrieval of caustics photons while ray-traced rendering.
[report] [presentation]
- MOTIVATION and PROBLEM DEFINITION
Photorealistic computer graphics attempts to match as closely as possible the
rendering of a virtual scene with an actual photograph of the scene had it existed
in the real world. Of the several techniques that are used to achieve this goal,
physically-based approaches (i.e. those that attempt to simulate the actual
physical process of illumination) provide the most striking results. My thesis is on
the problem of producing global illumination (GI) solution for point models, which
happens to be a photorealistic, physically-based approach central to computer
graphics. For example, these three-dimensional point models may be
scans of cultural heritage structures (see Figure above) and we may wish to
view them in a virtual museum under various lighting conditions.
Note that the point clouds of interest are not solitary models, but may consist
of hard to segment entities thereby inhibiting a surface reconstruction algorithm that produces meshes.
PROBLEM DEFINITION: Capturing interreflection effects in a scene when the
input is available as point samples.
- WORK DONE
- We compute diffuse inter-reflections using the Fast Multipole Method}(FMM) (Done)
- Computing a mutual visibility solution for point pairs is one major
and a necessary step for achieving good and correct global illumination effects (Done)
- CPU-based implementations of visibility and FMM algorithms were quite time consuming and
hence did not have a high practical usage. Parallel implementation of visibility and FMM algorithms on
Graphics Processing Units(GPUs) using CUDA was done so as to achieve multi-fold speedups for generating the diffuse
global illumination solution (Done)
- We have three different implementations of a parallel octree construction
algorithm on GPU which can be used with the GPU-based parallel FMM algorithm (Done)
- Inter-reflection effects include both diffuse (Done) and specular effects like
reflections, refractions, and caustics. Capturing specular reflections is a part of work to be
done in the coming year, which essentially, when combined with the diffuse inter-reflection
implementation, will give a complete global illumination package for point models. Methods like
Splat-based ray-tracing and Selective Photon Tracing will be used for the same.
- PUBLICATIONS
- GPU-based hierarchical Computations for View-Independent Visibility, Rhushabh Goradia, Prekshu Ajmera, Sharat Chandran. In the Proceedings of ICVGIP 2008, Sixth Indian Conference on Computer Vision, Graphics and Image Processing.
[pdf]
- Fast, Parallel, GPU-based Construction of Space Filling Curves and Octrees, Rhushabh Goradia, Prekshu Ajmera, Sharat Chandran, Srinivas Aluru. In the Proceedings of ACM SIGGRAPH i3D 2008, Symposium on Interactive 3D Graphics and Games (as a poster).
[pdf] [poster]
- Visibility Map for Global Iluumination in Point Clouds, Rhushabh Goradia, Anilkumar Kanakanti, Sharat Chandran, Amitava Datta. In the Proceedings of ACM SIGGRAPH GRAPHITE 2007, 5th International Conference on Computer Graphics and Interactive Techniques in Australasia and Southeast Asia.
[pdf] [presentation]
- TECHNICAL REPORTS
- Fast, GPU-based Illumination Maps for Point Models using FMM, Rhushabh Goradia, Prekshu Ajmera, Sharat Chandran.
- GPU-based, Parallel Octree Construction Algorithms, Rhushabh Goradia, Prekshu Ajmera, Sharat Chandran, Srinivas Aluru.
RESULTS
- CPU-based V-map Construction (Sample Videos)
- CPU-based Global Illumination for Point Models using FMM
We converge to the final Global Illumination solution shown in the figure below
by performing the FMM algorithm (Upward and then Downlward passes) for all colors (RGB)
three times. We can see that the solution converges to a good extent in 3 iterations.
- GPU-based V-map Construction
Quality Results
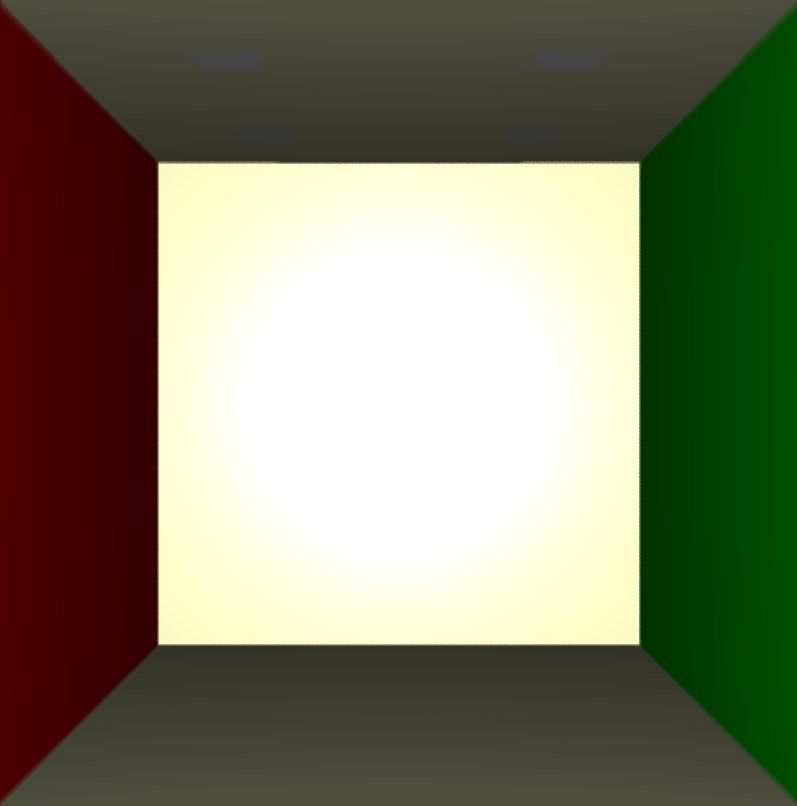
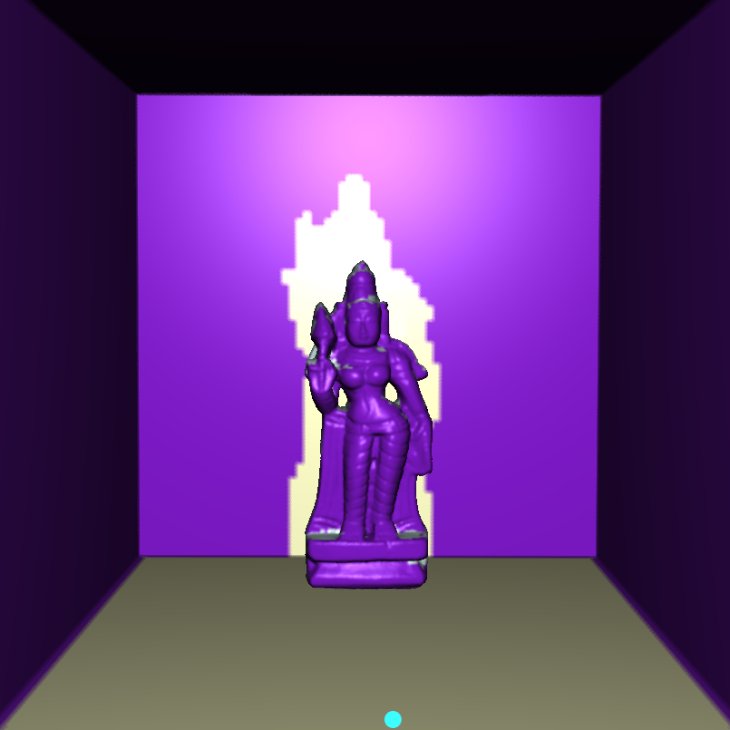
Figure on the left shows a point model of an empty Cornell
room with some artificial lighting to make the model visible. Note the
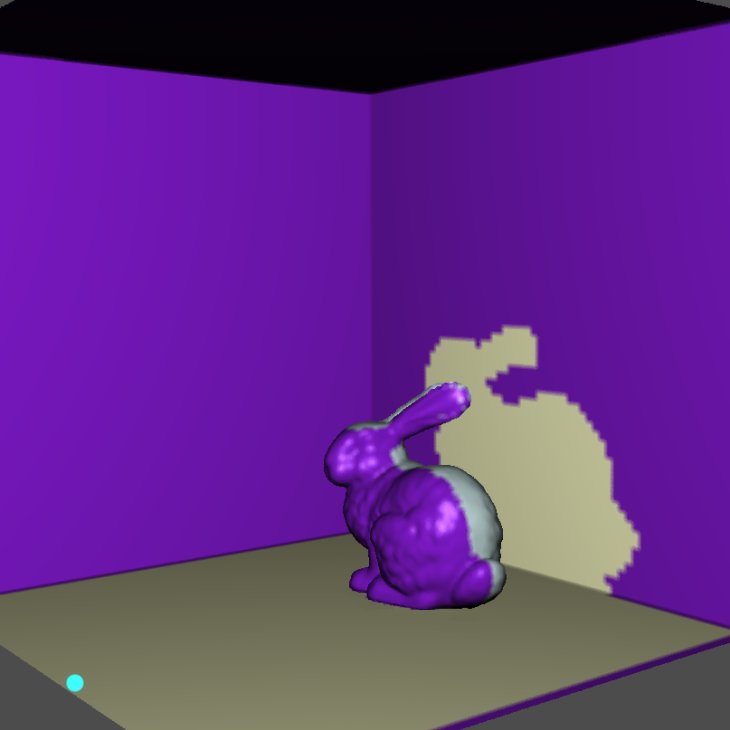
default colors of the walls. We now introduce a bluish white Stanford
bunny in the second figure, the eye (w.r.t. which visibility
is being computed) is on the floor, marked with a cyan colored dot.
The violet (purple) color indicates those portions of the room that
are visible to this eye. Notice the "shadow" of the bunny on the
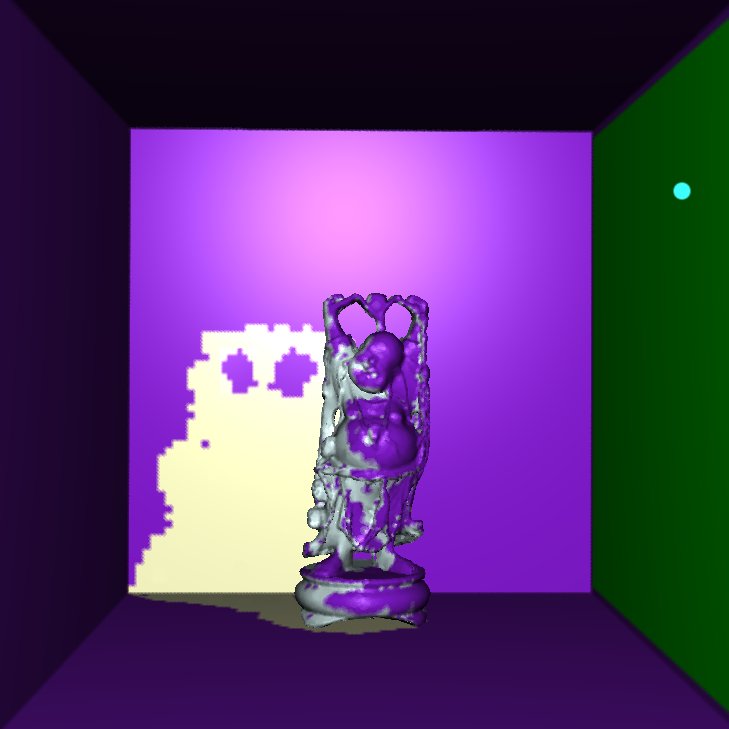
back wall. The same idea is repeated with the eye (marked in cyan)
placed at different locations for various different point models (all
bluish white in color) of the Buddha, and an Indian Goddess Satyavathi.
We found that an octree of height 8 gave us accurate visibility results,
however, it is more prudent to go to higher depths such as 9 or 10.
The results are visually similar to the ones generated by our CPU-based algorithm
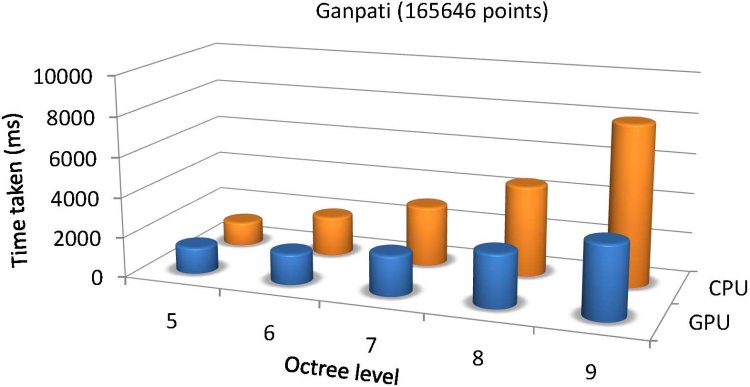
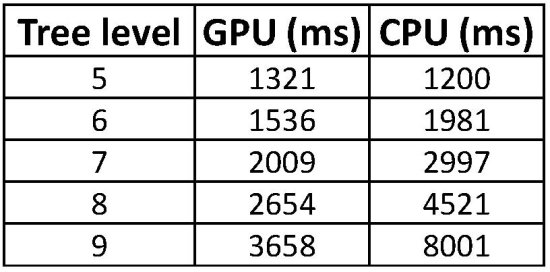
Timing Results
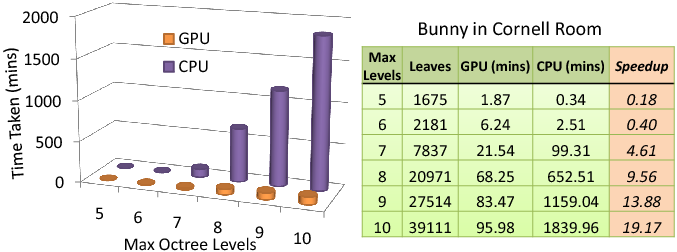
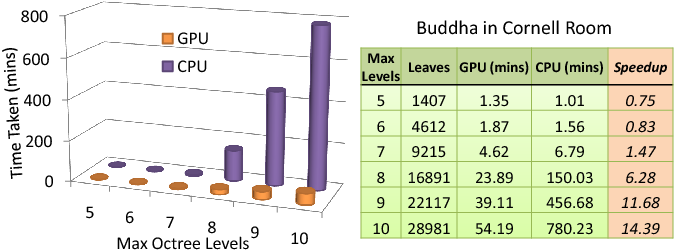
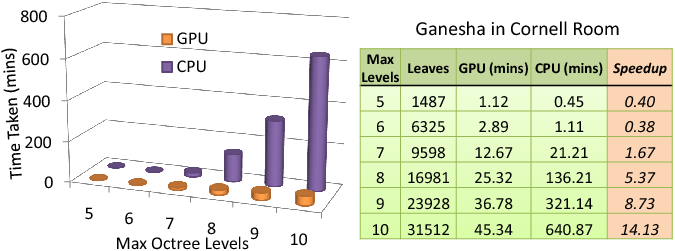
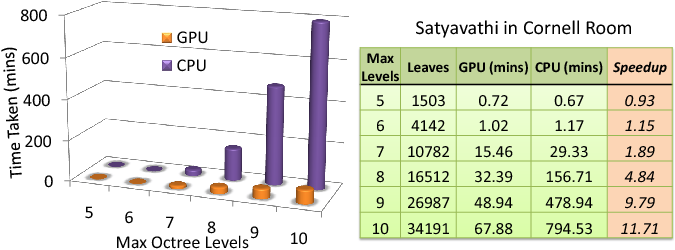
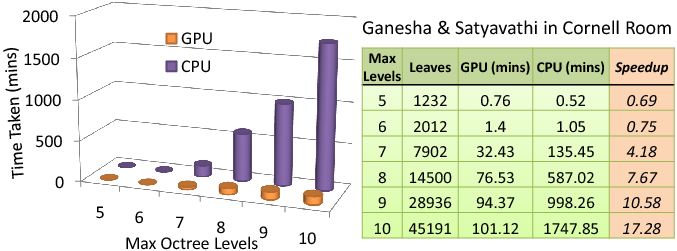
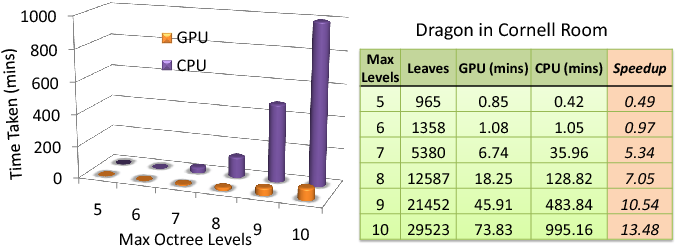
Figure shows the running time of our implementation.
Each graph in the figure refers to a particular model, and
shows the only-CPU, and CPU-GPU combo running time for various octree levels
(5-10). For example., Figure on the left (first row) shows results for the
Stanford bunny in the Cornell room while the second figure shows
the same for Buddha. The table also shows the number of leaves (at
various depths) in the various adaptive octrees. This is an important parameter
on which the degree of parallelism indirectly depends. The running
times tabulated, also depends on the number of threads per block. A
block size of 16x16 gives the best results with 256 threads per block.
The CPU and GPU have almost identical run times if the model has
octree height of 6 or below. For best throughput from the GPU
we need at least 16384 leaf-pairs to be considered concurrently
which is generally not the case for octrees built till level 6.
The GPU starts out performing the CPU for octrees with greater heights.
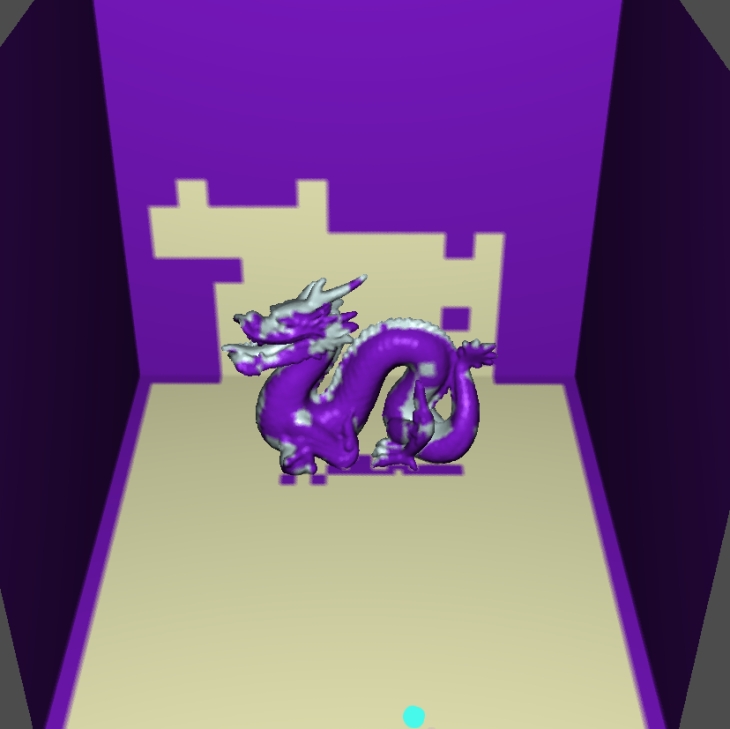
However, the quality of the visibility solution is below par for
octrees with heights 7 or below (refer the figure on the left below). Thus,
to get a good acceptable accuracy in results
and throughput from GPU, we use octree heights of at least 8.
Speedup is also given in the tables. We achieve an average
speed-up (across all models) of 15 when the input models are
divided with octree of height 10. Thus, we see that
the CUDA implementation of V-map construction algorithm is efficient
and fast. Once constructed, they allow for an interactive
walkthrough of the point model scene.
|
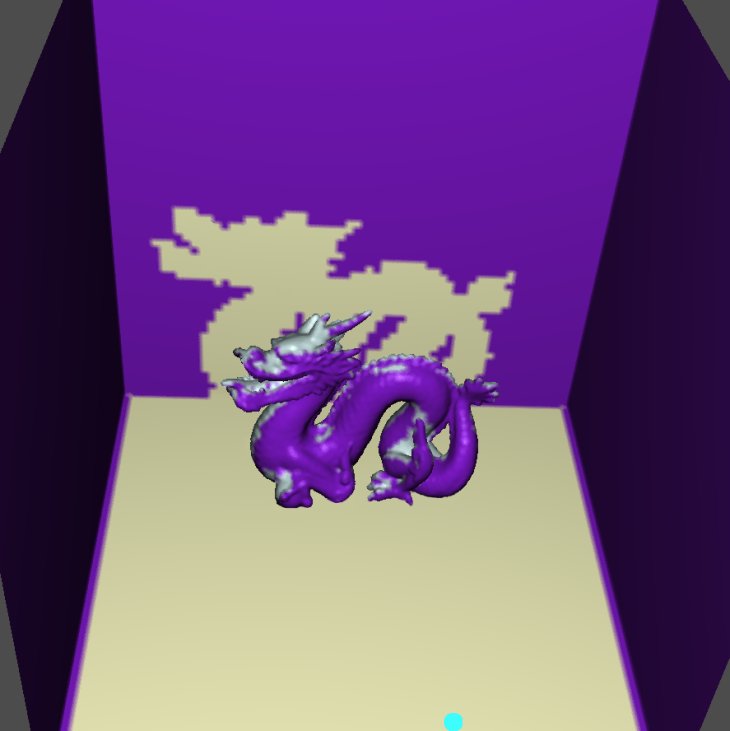
|
Dragon viewed from the floor (cyan dot). The quality is unacceptable for
octrees of heights of 7 (left) or less. The figure on the right is for an octree of height 9
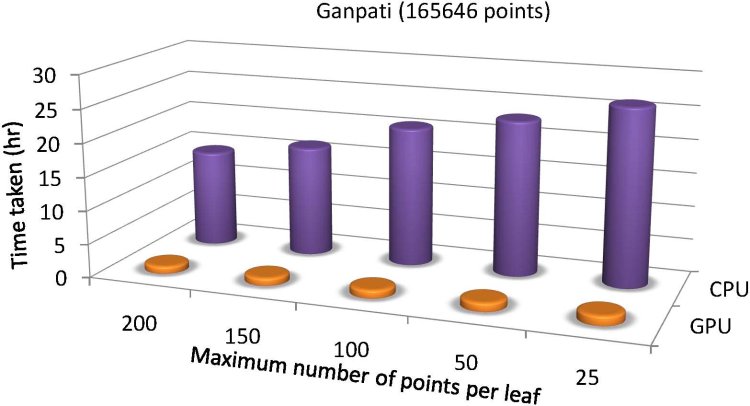
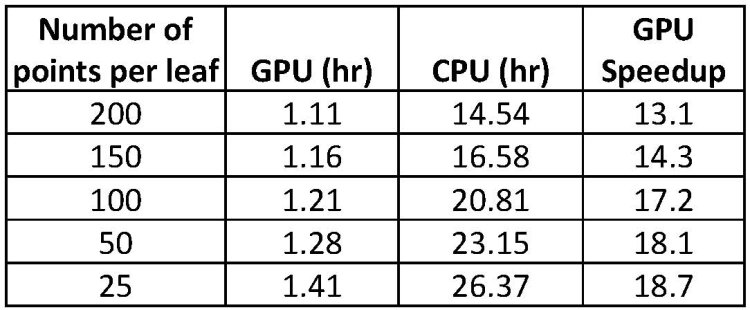
- GPU-based Global Illumination for Point Models using FMM
Quality Results
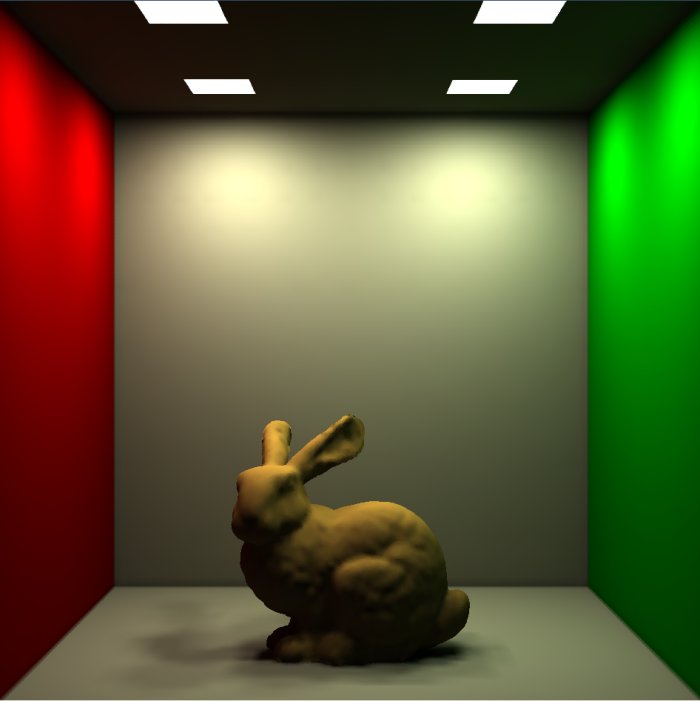
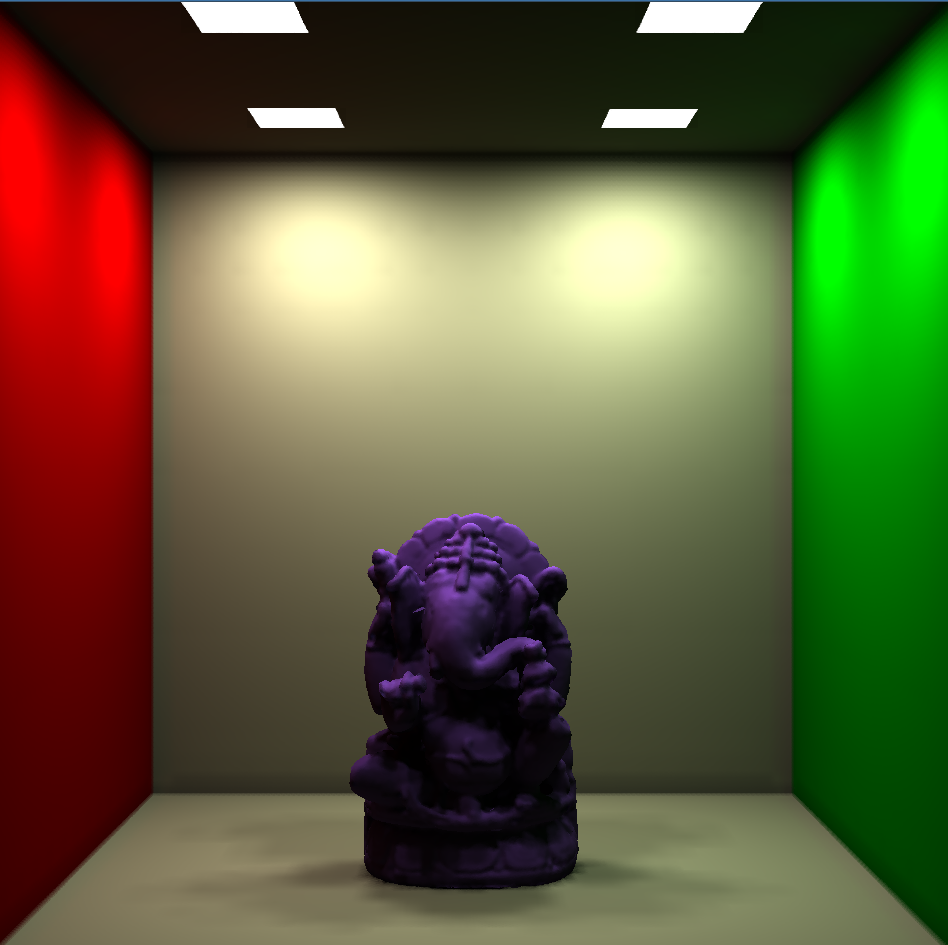
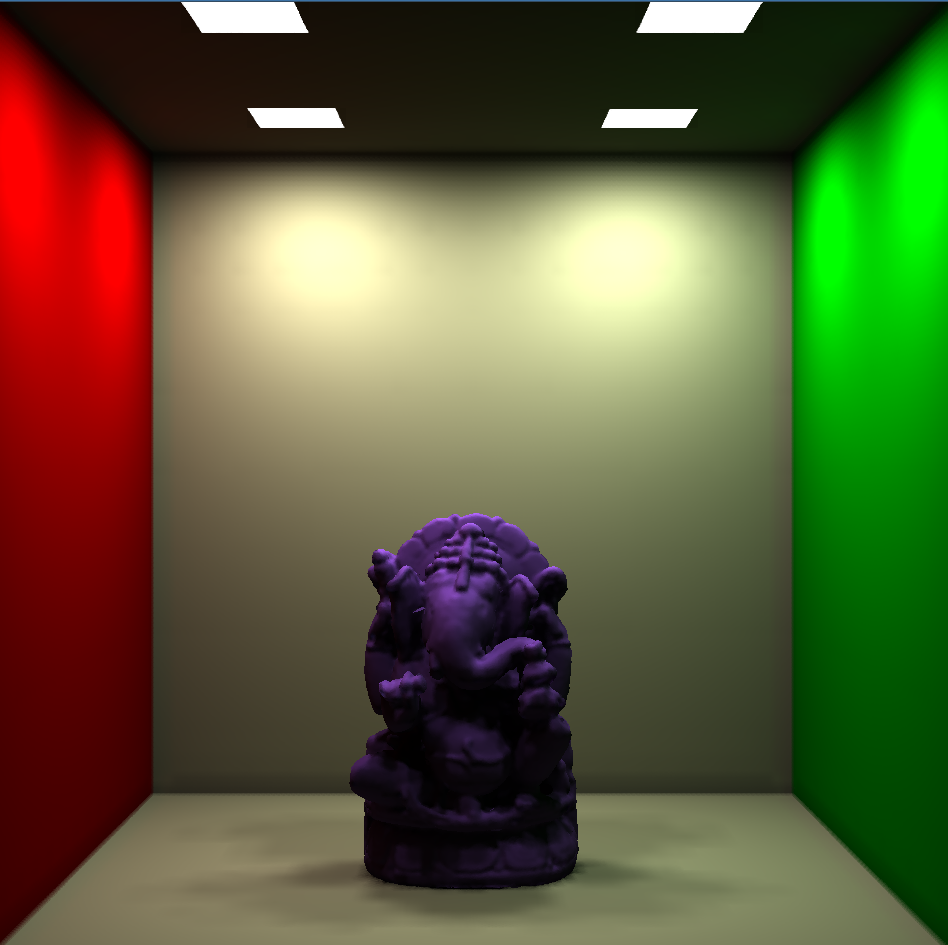
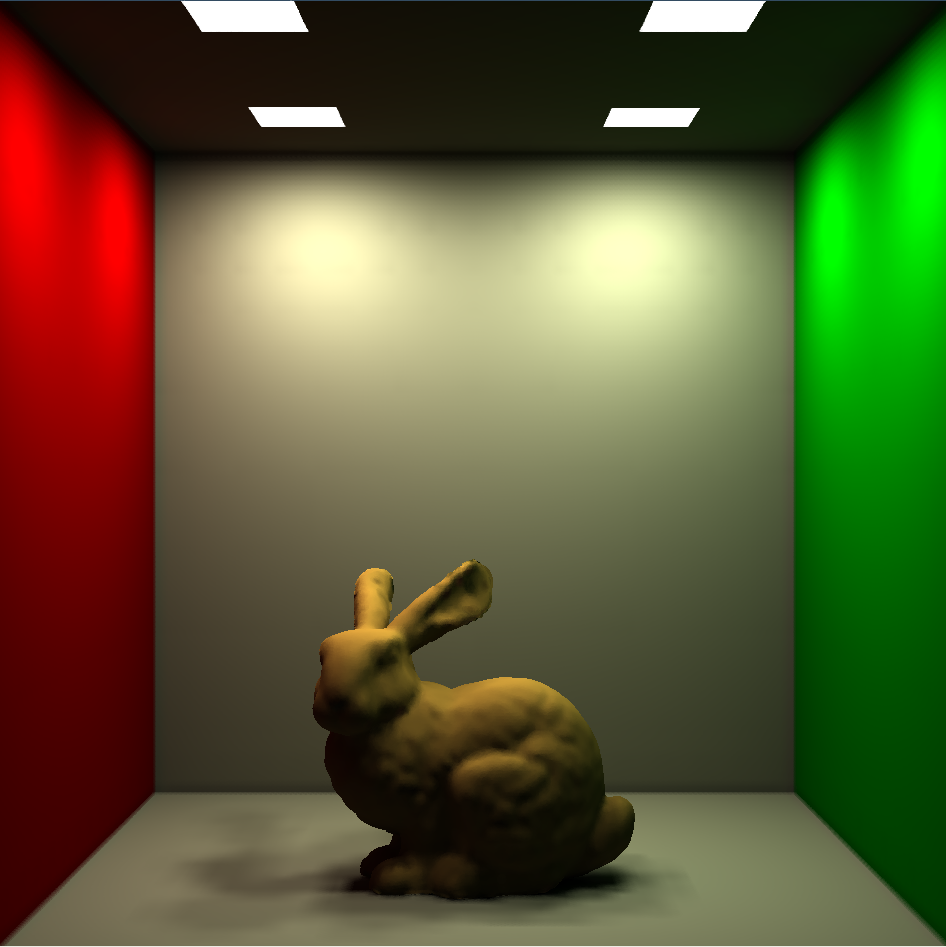
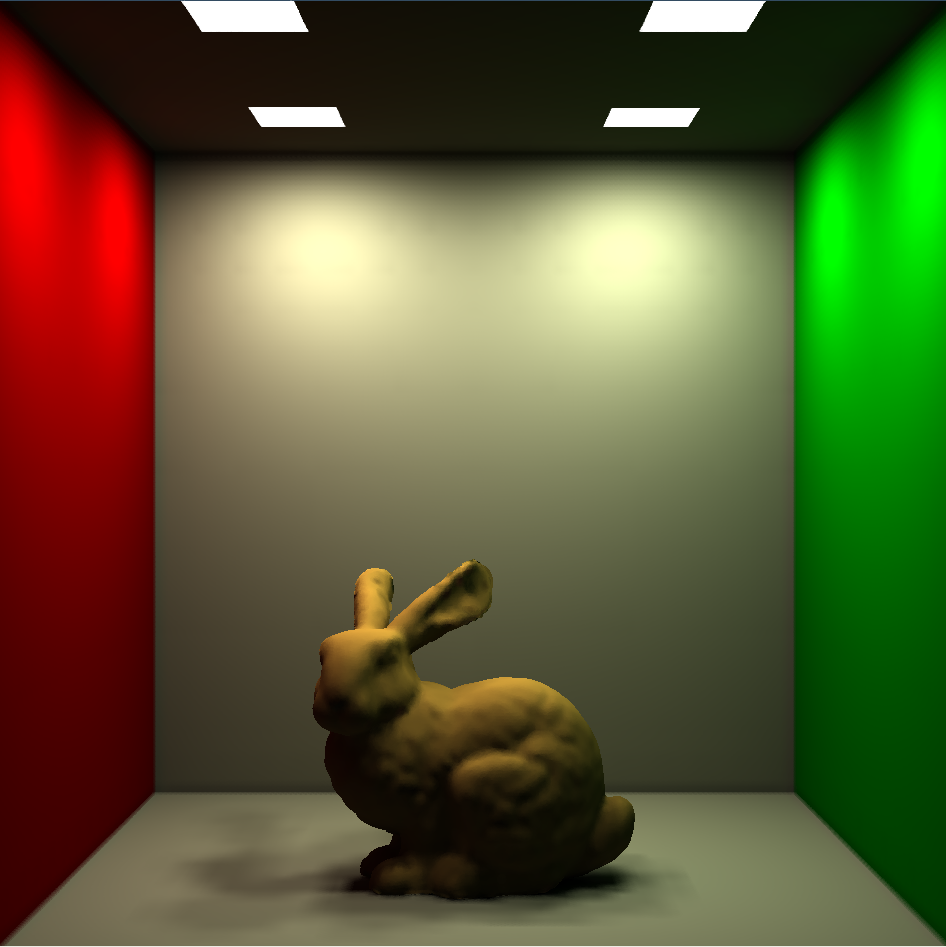
First we compare the results obtained on the GPU for quality with the corresponding
implementation on the CPU. To compare CPU and GPU implementations we use 3-d point models
of bunny and Ganesha in a Cornell room each having four light sources on the ceiling.
As we can see in the figure, the CPU-GPU results look identical.
Global illumination effects like color bleeding and soft shadows are also clearly visible.
Note that for FMM the visual quality of result does not depend on the kind of GPU used
(NVIDIA 8800 GTS or Quadro FX 3700). The GPU should just support CUDA and have enough memory (more than 256Mbs).
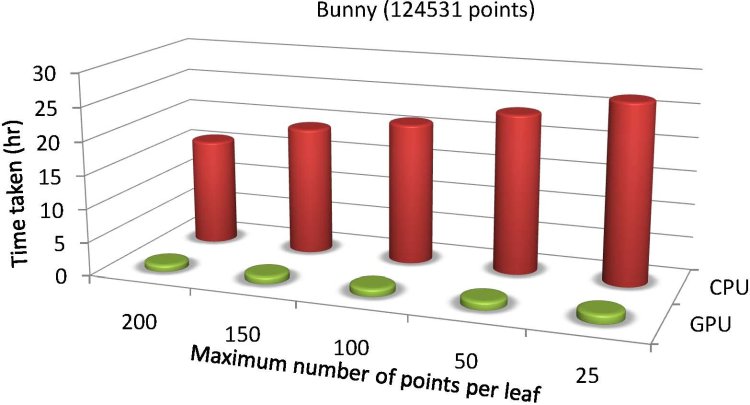
Timing Results
The timing calculations are done on a machine having a dual core AMD Opteron 2210
processor with 2 Gbs of RAM, NVIDIA GeForce 8800 GTS with 320 Mbs of memory and Fedora
Core 7 (x86\_64) installed on it. The total time taken by the upward and downward passes
of the FMM algorithm for all 3 iterations and all 3 colors RGB is shown in the results below.
The time taken by each iteration is approximately same.
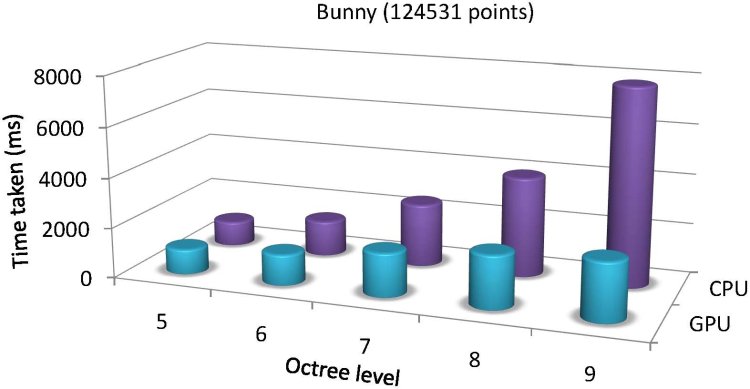
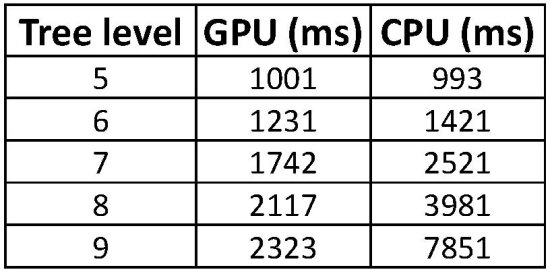
- GPU-based Parallel Adaptive Octree Construction (Top-Down)
We compare our implementation of octree on the GPU with the corresponding implementation
on the CPU based on running time. We use 3-d points models of bunny and Ganesha in a Cornell
room as inputs to create the octree.
We see that the GPU outperforms the CPU at higher levels. We implemented the top-down
GPU-based parallel octree construction algorithm using the latest NVIDIA GPUs featuring
support for atomic operations like atomic increment/decrement etc. These GPUs have G92
architecture. The machine used has a Intel Core 2 Duo 1.86 GHz with 2 Gbs of RAM, NVIDIA
Quadro FX 3700 with 512 Mbs of memory and Fedora Core 7 installed on it.
The GPU-based parallel octree constructed in this fashion can be used with GPU-based parallel FMM frame-work.
CONCLUSION
Point-sampled geometry has gained significant interest due to their simplicity.
The lack of connectivity touted as a plus, however, creates difficulties in many
operations like generating global illumination effects. This becomes especially
true when we have a complex scene consisting of several models, the data for which
is available as hard to segment aggregated point-based models. Inter-reflections
in such complex scenes requires knowledge of visibility between point pairs.
Computing visibility for point models becomes all the more difficult, than for
polygonal models, since we do not have any surface or object information.
Point-to-Point Visibility is arguably one of the most difficult
problems in rendering since the interaction between two primitives
depends on the rest of the scene. One way to reduce the difficulty is
to consider clustering of regions such that their mutual visibility is
resolved at a group level. Most scenes admit clustering, and the
Visibility Map data structure we propose enables efficient answer to
common rendering queries. We extended, in this report, the novel,
provably efficient, hierarchical, visibility determination scheme for
point based models to the highly parallel structures of modern day GPUs.
By viewing this visibility map as a `preprocessing' step, photo-realistic
global illumination rendering of complex point-based models have been shown.
By extending the V-map construction algorithm on the GPU, efficient speed-ups
have also been reported.
Further, we have used the Fast Multipole Method (FMM) as
the light transport kernel for inter-reflections, in
point models, to compute a description -- illumination maps --
of the diffuse illumination. Parallel implementation of FMM is a difficult
task with data decomposition and communication efficiency
being the major challenges. We discussed
one such algorithm which uses only a static data decomposition on octrees and
offers communication efficiency. We exploited the parallel
computing power of GPUs for implementation of the Fast Multipole Method based
radiosity kernel as well as the point-pair visibility determination algorithm using
Visibility Maps to provide an efficient, fast inter-visibility and global illumination
solution for point models. Different implementations of parallel octree construction on GPU were
also presented which are to be eventually merged with the GPU-based parallel FMM algorithm.
A complete global illumination solution for point models should cover both diffuse
and specular (reflections, refractions, and caustics) effects. Diffuse global illumination
is handled by generating illumination maps. We, thus, further saw in the report how
various algorithms from the literature were combined under a single domain to get us a
time-efficient system designed to generate the desired specular effects for point models.
We now aim to implement these algorithms, merge them together and get the specular
effects solution for point models.
We, thus, will have a two--pass global illumination solver for point models. The input
to the system will be a scene consisting of both diffuse and specular point models. First pass
will calculate the diffuse illumination maps, followed by the second pass for specular effects.
Finally, the scene will be rendered using splat-based ray-tracing technique. However, a question
remains that since we are parting the diffuse and specular effect calculations for the scene,
how would we handle specular objects (and their effects on diffuse objects) while calculating
only diffuse global illumination (This issue is very well handled in Photon Mapping)
in the first pass of the global illumination solver. This important issue needs to be investigated thoroughly.
PRESENTATION
[Poster(pdf)] [Poster(pptx)]
More information on research in computer vision, graphics and image processing at ViGIL, IIT Bombay can be found at
ViGIL: Vision, Imaging and Graphics Laboratory
Back to top
Last update: 25 Aug, 2008
Rhushabh Goradia
|
|